来自Minimaforms http://minimaforms.com/
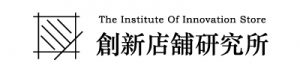
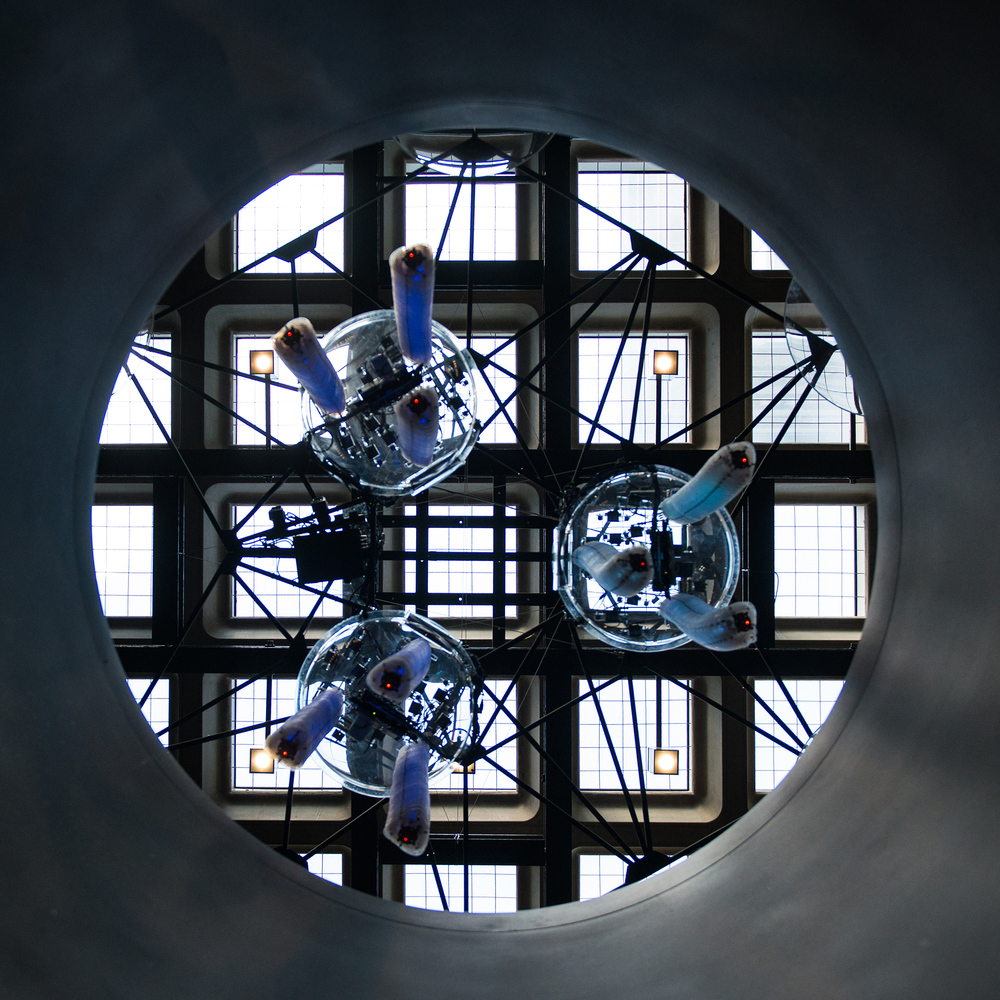
迷你动物园(Petting Zoo) 是Minimaforms的最新项目,项目创造了一个有生命的机械情境来探讨未来环境所营造的新型的日常交流方式。人工智能的“生命体”有能力学习和探索环境参与者的行为并与之互动。这种身临其境地与“宠物”进行互动,可以培养人们的好奇心,创造出更加亲密的交流方式,这种交流方式是富有“情感”并且随时间的推进而逐渐加深。这一项目某种程度上超越了科技的范畴,探索出环境与人交流的新方式。





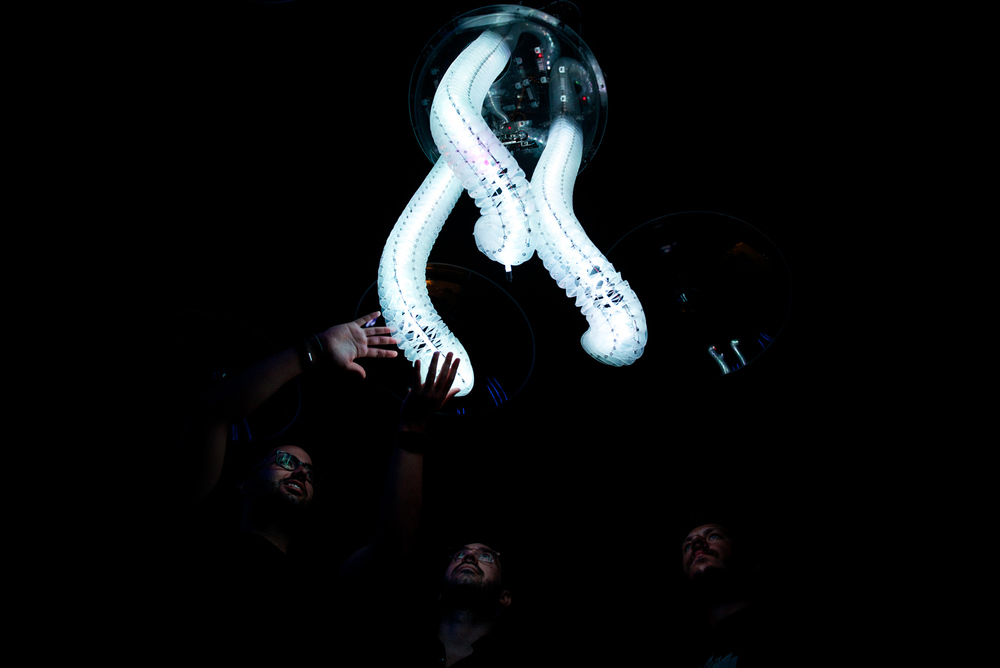

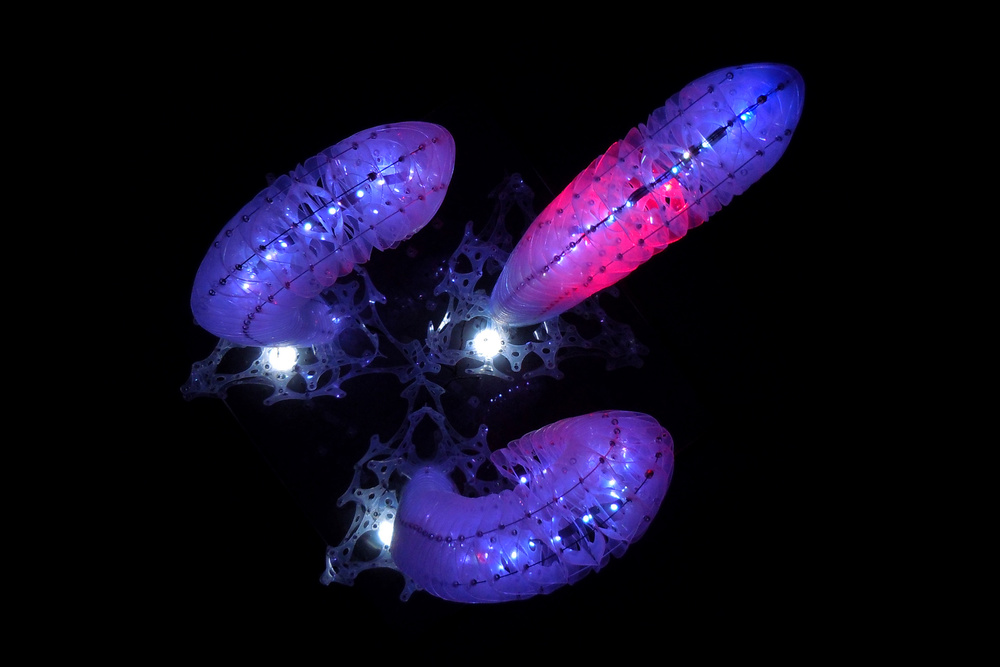
装置通过一种对话式的互动方式,显示出了某种“生命”特性,这种互动方式使得装置与使用者之间建立起了一种有“情感”的交流方式。作为一个体验性的装置环境,具有社会性和模拟性的互动系统,使“宠物”可以对他们自己的行为进行进化。装置通过一系列有活力的行为,如摆动,声音和光线的变化来参与人的互动与参与者进行交流。这些行为通过时间的变化不断进化,从而使每一个“宠物”发展出不同的个性。“宠物”的互动通过与使用者和群体内其他“宠物”的交流被激发出来。亲密感与好奇心被探寻了出来,使得装置在视觉、触觉和听觉等方面体现出自身的个性特。

类似这个项目的概念在英国控制论雕塑家,Edward Ihnatowicz的“Senster”,Gordon Pask的 “Colloquy of Mobiles”以及Walter Gray Walter的第一个自主机器人“Elmer 和 Elsie”中都有所体现。迷你动物园(Petting Zoo)是Minimaforms基于控制和行为的设计系统研究系列的一部分,关于这一研究的项目还有在MoMA的Becoming Animal,2011 底特律Talk to Me表演和2008年伦敦ICA Memory Cloud。

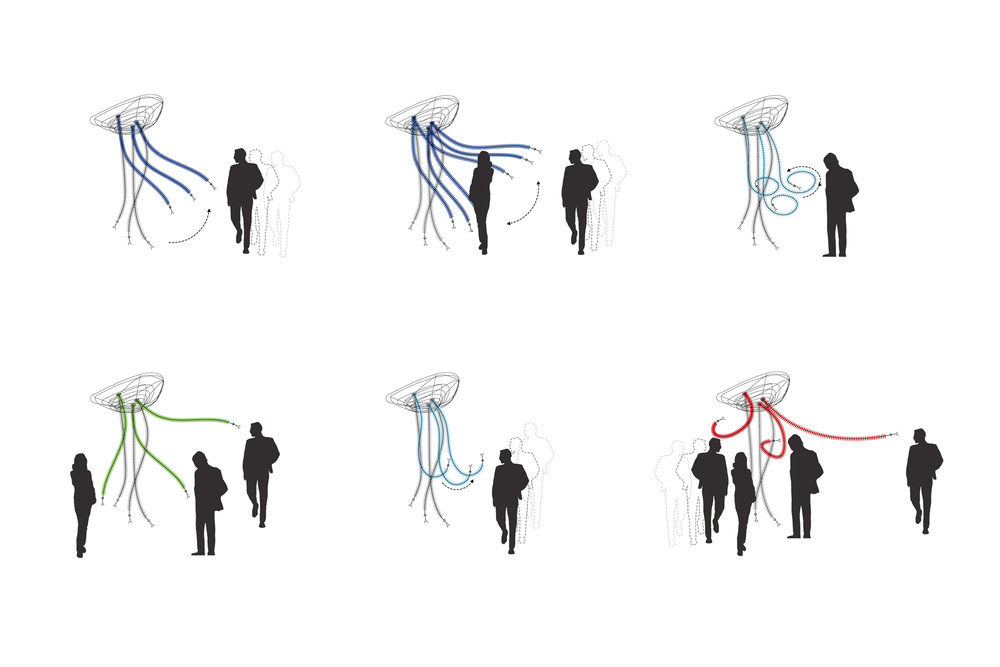
行为
内部的观察模式允许“宠物”同步地对于动作和行为进行反应。通过动态的数字模拟反馈,系统发展出一种进化的关系而避免有重复控制的倾向。
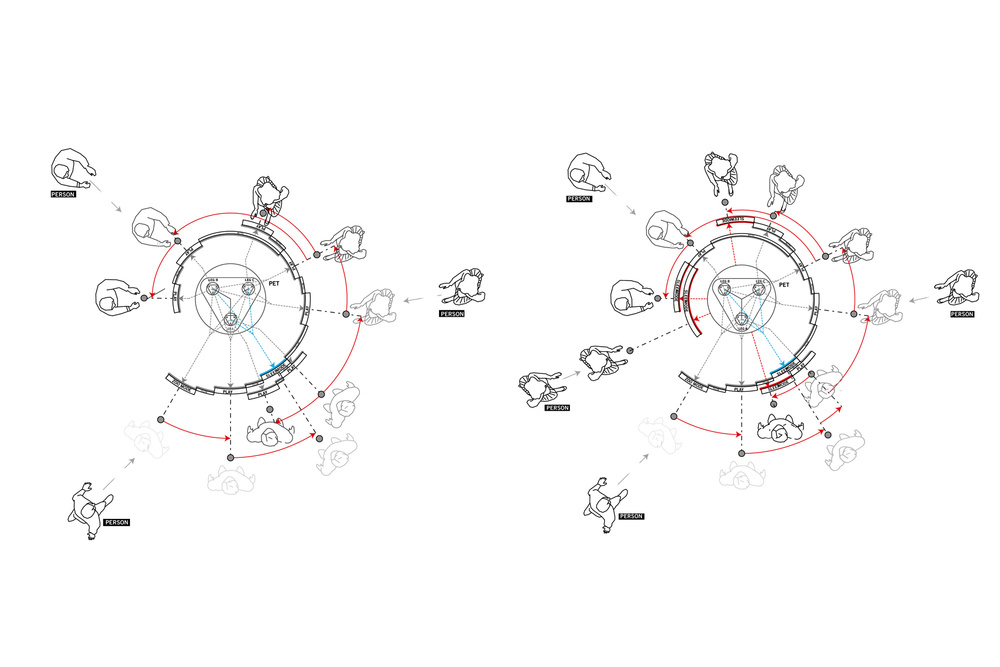
空间接口
通过摄像机的追踪和数据扫描可以识别场景中参与者,从而实现对于参与者的感知。实时的影像数据、斑点追踪和光流场分析共同定位参与者的位置和动作。消极的参与者的参与行为也可以被激发出来,而不会有无趣和无聊的反应。

多使用者互动
多人参与通过系统实时计算和识别参与者的人数来实现。
组件
实体装置-自发动作,使用者和多使用者互动。
输入数据-位置,触摸,动作和多使用者互动。
输出数据-声音,震动,颜色和光线。
Kinect-实时数据采集。






Petting Zoo is the latest work developed by experimental architecture and design studio Minimaforms. The project is speculative life-like robotic environment that raises questions of how future environments could actively enable new forms of communication with the everyday. Artificial intelligent creatures have been designed with the capacity to learn and explore behaviors through interaction with participants. Within this immersive installation interaction with the pets foster human curiosity, play, forging intimate exchanges that are emotive and evolving over time. Beyond technology the project explores new forms of enabled communication between people and their environment.
The installation exhibits life-like attributes through forms of conversational interaction establishing communication with users that is emotive and sensorial. Conceived as an immersive installation environment, social and synthetic forms of systemic interactions allow the pets to engage and evolve their behaviors over time. Pets interact and stimulate participation with users through the use of animate behaviors communicated through kinesis, sound and illumination. These behaviors evolve over time through interaction enabling each pet to develop personalities. Pet interactions are stimulated through interaction with human users or between other pets within the population. Intimacy and curiosity are explored as enabling agents that externalize personal experience through forms of direct visual, haptic and aural communication.
Early historical experiments that examine similar issues can be found in the seminal cybernetic work of the Senster developed by the British cybernetic sculptor, Edward Ihnatowicz, Gordon Pask’s The Colloquy of Mobiles, and Walter Gray Walter’s first electronic autonomous robots (Tortoises) called Elmer and Elsie. Petting Zoo continues Minimaforms ongoing research in participatory and enabling frameworks examining cybernetic and behavior based design systems that can be found in other works of theirs like Becoming Animal exhibited in MoMA’s Talk To Me show and Memory Cloud: Detroit (2011) ICA London (2008).
Behaviors
Internal patterns of observation allow the pets to synchronize movements and behavioral responses. Through active proto-typing a correlated digital / analogue feedback has been developed to allow the system to evolve relationships that avoid repetitive controller tendencies.
Spatial Interfacing
Awareness of participant(s) is enabled through camera tracking and data scanning that allows for identifying human presence within contextual scenes. Real time camera streams are processed and coupled with blob tracking and optical flow analysis to locate positions and gestural activity of participants. Inactive participation of a performer in the environment can stimulate responses of disinterest and boredom.
Multi-User Interaction
Collective participation is enabled by the ability of our system to identify and real-time map the number of performers within a durational sequence.
Components:
Physical Sculpture – autonomous movement, user and multiuser interaction.
稿件由建筑设计师张一楠编译,如需转载请注明出处及译者姓名